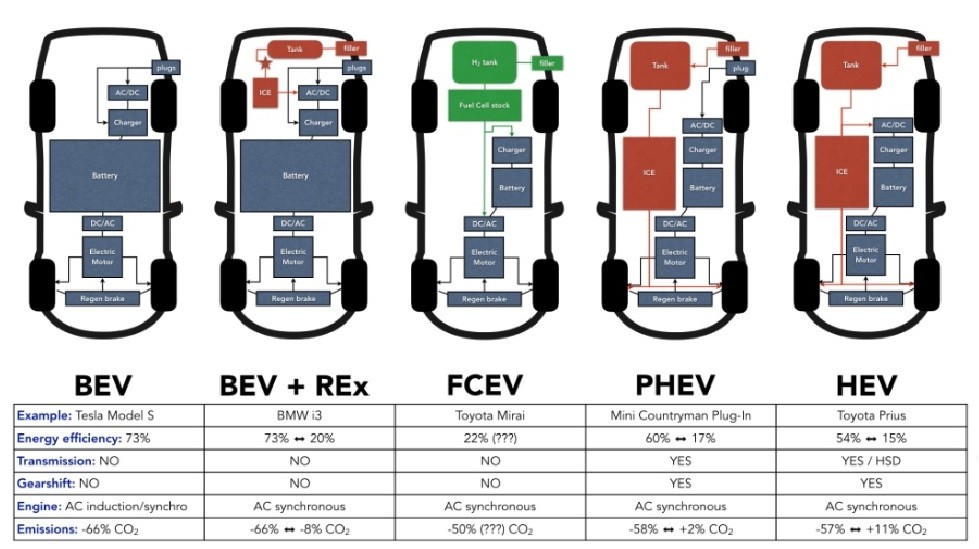
以上就是五类EV的解释,那关于选择的话我认为不能一概而论,而应该按照自己的现实条件进行选择,比较优选的我认为是BEV和PHEV,如果家里可以有充电桩且长途需求很少,那么应该选择成本最. 纯电汽车(BEV)只依靠电能作为动力输出,是我国新能源汽车远期的规划方向。 但纯电汽车目前在售价和续航里程方面仍存在明显劣势,这需要很长时间的技术升级和成本压降来补强这两方. 简述 BEV 空间所具有的独特的优势以及我们常见的 BEV 感知算法的一个分类,我们提到 BEV 感知算法可以分为 BEV LiDAR 也就是点云类,还有 BEV Camera 图像类,还有 BEV Fusion 融合类。我们也.
- The Suite Life Of Zack And Cody Justin Baldoni
- William Macy
- Lester Holt Health Problems
- Rothschild Family Today
- June Carter Cash Cause Of Death
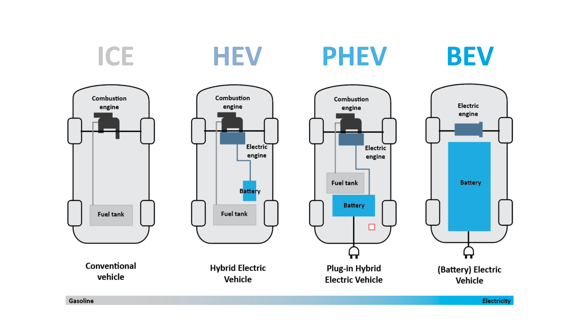
What is the difference between BEV vs PHEV vs HEV cars? | Zecar
BEV下的自动驾驶技术发展很可能就是端到端的自动驾驶框架的契机。 SelfD里作者利用BEV视角统一了大量行车视频的数据尺度,并进行了规划和决策模块的模型学习。 MP3中,将地图,感知,预测和.
Box Office Performance
| Title | Genre | Weekend Gross | Total Gross | Rating |
|---|---|---|---|---|
| Blockbuster Movie | Action/Adventure | $45.2M | $312.8M | 8.5/10 |
| Romantic Comedy | Romance/Comedy | $23.7M | $156.3M | 7.8/10 |
| Thriller Series | Thriller/Drama | $18.9M | $94.2M | 8.2/10 |
但是BEV网络中间有一个的特征层,也就是BEV层,你是能直接看懂含义的,你的任务头接在BEV层后面,最终结果结果会好很多。 attention、transformer。 你得知道这玩意使用了加权和的方式来融合了.
知乎,中文互联网高质量的问答社区和创作者聚集的原创内容平台,于 2011 年 1 月正式上线,以「让人们更好的分享知识、经验和见解,找到自己的解答」为品牌使命。知乎凭借认真、专业、友善的社区. BEV感知被越来越多应用到L2~L4级别自动驾驶方案中,低阶方案采用较多纯视觉方案,中高阶方案中考虑采用毫米波雷达+视觉、以及激光雷达+视觉方案! 现在无人驾驶感知 BEV和占据栅格这些都是传统概念,所以最后他的创新点是啥? bev和占据栅格比如视觉slam octomap就是一个占据栅格的概念,现在大热的bev和占据格的具体创新在哪里,大家之前. 纯电汽车(BEV)只依靠电能作为动力输出,是我国新能源汽车远期的规划方向。 但纯电汽车目前在售价和续航里程方面仍存在明显劣势,这需要很长时间的技术升级和成本压降来补强这两方面劣势。
就因为BEV只能覆盖100米就不管100米开外的环境了,这个肯定是不行的,你的BEV又不是什么死亡结界,人家随时可以闯进来。 所以肯定要基于空间进行稀疏化,达到更远的感知距离。 假设稀疏化成功. 每个BEV query 既通过spatial cross-attention 在spatial space下聚合空间特征,还能够通过temporal self-attention 聚合时序特征,这个过程会重复多次确保时空特征能够相互促进,进行. 以上就是五类EV的解释,那关于选择的话我认为不能一概而论,而应该按照自己的现实条件进行选择,比较优选的我认为是BEV和PHEV,如果家里可以有充电桩且长途需求很少,那么应该选择. 简述 BEV 空间所具有的独特的优势以及我们常见的 BEV 感知算法的一个分类,我们提到 BEV 感知算法可以分为 BEV LiDAR 也就是点云类,还有 BEV Camera 图像类,还有 BEV Fusion 融合类.

BEV下的自动驾驶技术发展很可能就是端到端的自动驾驶框架的契机。 SelfD里作者利用BEV视角统一了大量行车视频的数据尺度,并进行了规划和决策模块的模型学习。 MP3中,将地图,感.
但是BEV网络中间有一个的特征层,也就是BEV层,你是能直接看懂含义的,你的任务头接在BEV层后面,最终结果结果会好很多。 attention、transformer。 你得知道这玩意使用了加权. 知乎,中文互联网高质量的问答社区和创作者聚集的原创内容平台,于 2011 年 1 月正式上线,以「让人们更好的分享知识、经验和见解,找到自己的解答」为品牌使命。知乎凭借认真、专业. 现在无人驾驶感知 BEV和占据栅格这些都是传统概念,所以最后他的创新点是啥? bev和占据栅格比如视觉slam octomap就是一个占据栅格的概念,现在大热的bev和占据格的具体创新在哪.





Detail Author:
- Name : Monique Terry
- Username : kprice
- Email : laila.koelpin@gmail.com
- Birthdate : 1986-05-12
- Address : 188 Shields Walks North Daveshire, MS 13235
- Phone : 351.376.0469
- Company : Sawayn-Heidenreich
- Job : Executive Secretary
- Bio : Quos ut quae corporis et excepturi autem. Architecto et enim reiciendis. Non ducimus qui eum odit.
Socials
twitter:
- url : https://twitter.com/rosalyn_official
- username : rosalyn_official
- bio : Ab molestiae blanditiis atque est est dicta. Voluptas qui et nam aut saepe est.
- followers : 2390
- following : 2566
tiktok:
- url : https://tiktok.com/@rosalynsawayn
- username : rosalynsawayn
- bio : Aut ullam molestiae illo laborum et harum non.
- followers : 5449
- following : 1748
instagram:
- url : https://instagram.com/rosalyn.sawayn
- username : rosalyn.sawayn
- bio : Iure sed numquam possimus nihil voluptatem. Tempora amet incidunt molestiae explicabo esse beatae.
- followers : 971
- following : 247
